


Dalam beberapa tahun kebelakangan ini, dengan populariti Internet yang berterusan, e-dagang telah berkembang pesat. Komoditi pesanan pelanggan menunjukkan ciri-ciri pelbagai jenis, beberapa kelompok dan tempoh penghantaran yang singkat, yang menjadikan ketumpatan penyimpanan rak di pusat pengedaran logistik pembekal terus bertambah baik. Kekerapan bahan masuk dan keluar gudang semakin meningkat. Bilangan pemetik bahagian kecil semakin meningkat dari hari ke hari. Semakin banyak pusat pengedaran logistik menggunakan sistem pengambilan barang berasaskan kereta ulang-alik kepada orang ramai.
HEGERLS (Hebei Walker Metal Products Co., Ltd.
Garpu teleskopik pengapit digunakan secara meluas dalam peralatan penyimpanan automatik seperti kereta ulang-alik pelbagai lapisan gudang stereo, tong jenis rak AGV, RGV, dan beban mini. Berat maksimum kotak bahan yang dipegang oleh HEGERLS boleh mencapai 50Kg. Lebar pengapit lengan garpu boleh dilaraskan sewenang-wenangnya dalam julat 200~600mm. Perjalanan memilih maksimum ialah 840mm. Kelajuan operasi maksimum garpu teleskopik ialah 1.5m/s, dan pecutan ialah 1.2m/s ²。 Bunyi operasi dikawal dalam 75dB, yang boleh memenuhi keperluan kebanyakan rak sambungan tunggal dan berganda. HEGERLS juga boleh menyesuaikan gudang stereoskopik kereta ulang-alik berbilang lapisan kotak garpu teleskopik pencengkam mengikut keperluan khusus pelanggan, seperti lebar cengkaman, pukulan petik dan parameter lain.
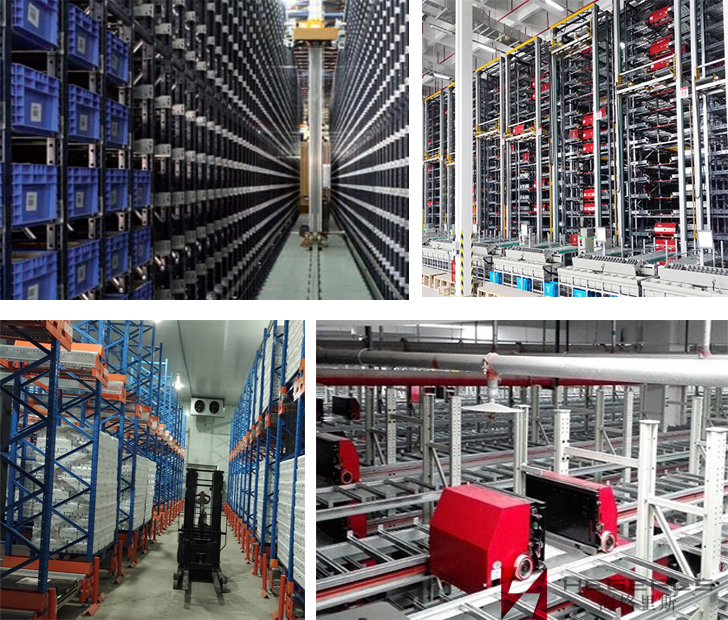
Bahagian dalam Hiygris HEGERLS mencengkam kotak garpu teleskopik gudang stereo kereta ulang-alik berbilang lapisan Garpu teleskopik ialah mekanisme teleskopik yang digunakan dalam gudang stereo dan sistem penyimpanan automatik logistik untuk penyimpanan atau pemindahan bahan. Ia mempunyai fungsi pengembangan automatik dua hala yang fleksibel dan fungsi had yang tepat! Ia boleh dipasang terus pada penumpuk, atau dipasang pada mekanisme angkat tetap, atau dipasang pada platform mengangkat mudah alih. Penyusun berjalan melalui jalan antara rak untuk mengakses atau memindahkan item secara automatik! Ia boleh disambungkan dengan sistem barisan pengeluaran dan sistem pengurusan perusahaan. Ia menggunakan teknologi komputer dan kod bar (pengekod) untuk merealisasikan pengurusan dan operasi pintar maklumat!

Mengenai HEGERLS Clamping Telescopic Fork
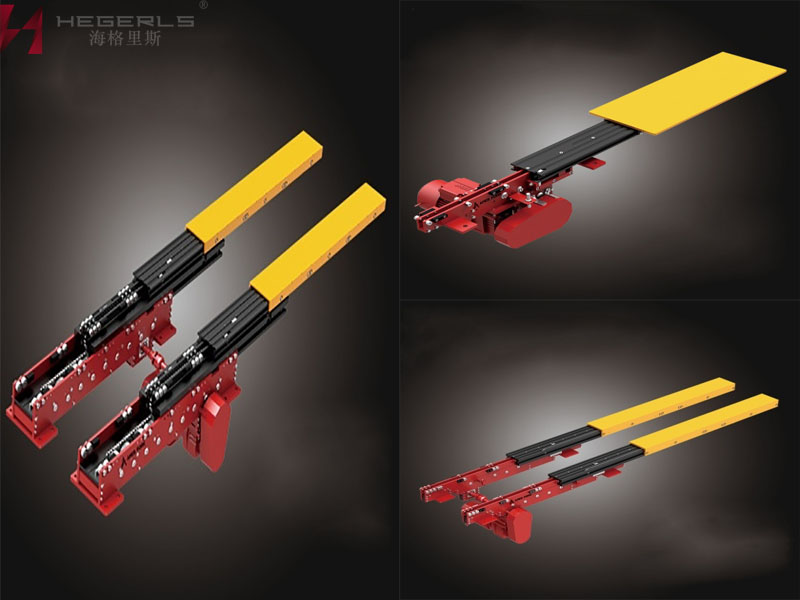
Garpu penggenggam teleskopik HEGERLS ialah sejenis garpu yang unik dalam siri garpu teleskopik penumpuk, iaitu garpu penggenggam teleskopik automatik dua hala, juga dikenali sebagai garpu penggenggam pegangan atau garpu penggenggam pemegang, garpu garpu atau garpu garpu. . Ia adalah garpu yang digunakan khas untuk pemindahan tong sampah kecil. Ia boleh dipasang terus pada AGV pemetik bertingkat atau platform kerja lain, dengan pengembangan lengan garpu dan klac tuil (cangkuk), Lengkapkan akses atau tindakan pemindahan!
Garpu penggenggam HEGERLS kebanyakannya diperbuat daripada aloi aluminium, menampilkan saiz kecil, ringan, kelajuan larian yang pantas dan pengembangan yang lancar. Pada masa yang sama, ia juga mengamalkan prinsip penyegerakan berbilang motor, menyedari bahawa mekanisme garpu teleskopik yang sama boleh digunakan untuk memindahkan atau mengakses kotak dengan spesifikasi yang berbeza. Ia bukan sahaja berkesan meningkatkan kecekapan storan, tetapi juga meningkatkan kadar penggunaan ruang storan, terutamanya untuk pergudangan Pintar intensif bertingkat tinggi!
Klip HEGERLS pada struktur garpu teleskopik
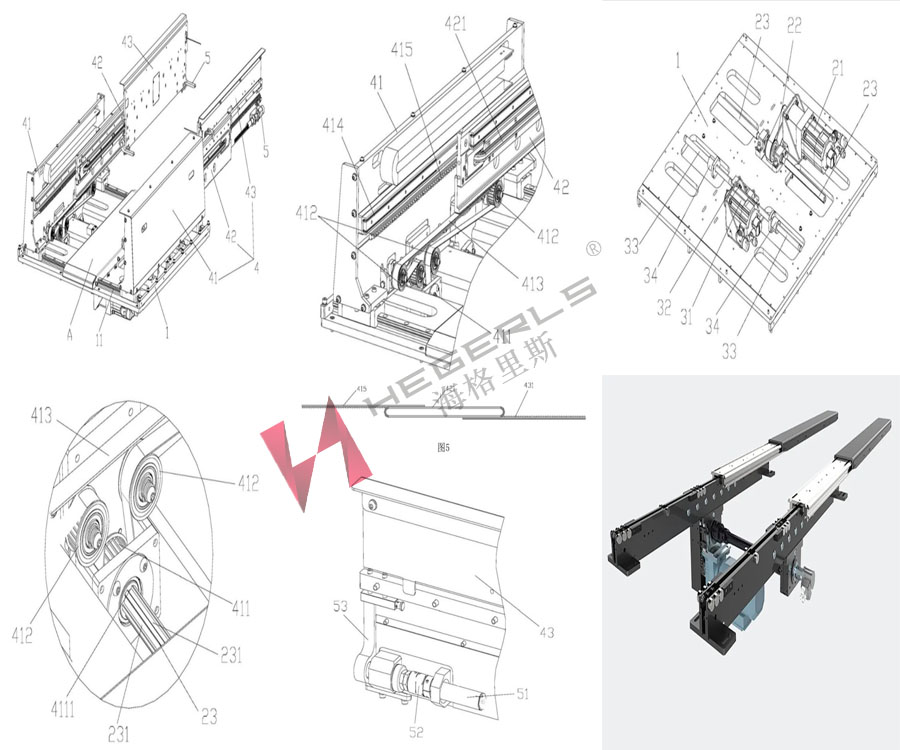
Struktur garpu penggenggam HEGERLS boleh dibahagikan kepada lokasi penyimpanan dalam dan lokasi penyimpanan cetek. Lokasi penyimpanan dalam ialah lokasi penyimpanan dengan dua kotak bahan, dan lokasi penyimpanan cetek ialah lokasi penyimpanan dengan satu kotak bahan. Iaitu, lokasi storan dalam boleh mengapit dua kotak bahan pada satu masa, manakala lokasi penyimpanan cetek hanya boleh mengapit satu kotak bahan pada satu masa. Perbezaan antara garpu penggenggam HEGERLS dan garpu teleskopik dupleks biasa ialah garpu penarik jari masih terdiri daripada tiga badan garpu, iaitu badan garpu dalam, badan garpu tengah dan badan garpu luar, kecuali badan garpu hadapan. mempunyai satu lagi batang tarik (cangkuk), yang dipadankan dengan rel panduan (rel slaid), bar roller, roda segerak, tali pinggang segerak, bar lancar, rod anjakan (cangkuk), aci bicu, bar roda, motor pemacu (servo) , motor rod anjakan Instrumen pengesanan dan komponen lain membentuk mekanisme teleskopik lengkap, yang bekerjasama dengan lengan garpu teleskopik dan klac tuil (cangkuk) untuk melengkapkan tindakan akses atau pemindahan!
Prinsip kerja klip HEGERLS pada garpu teleskopik
Lengan garpu garpu penggenggam HEGERLS berada di sisi berdiri dan disambung secara sisi dengan rel panduan. Melalui kawalan, rel panduan boleh meluncur ke depan dan ke belakang untuk melaraskan jarak antara dua lengan garpu garpu, untuk mencapai penggunaan biasa garpu untuk kotak bahan berbilang spesifikasi! Apabila mengambil bahan, garpu memanjang ke kedudukan penyimpanan bahan, cangkuk penahan (tuil) secara automatik merendahkan dan menyekat muka hujung karton atau kotak plastik, dan kemudian garpu menarik balik, menyeret karton atau kotak plastik ke tengah garpu, dan kemudian bergerak keluar secara terbalik mengikut keperluan darjah, cangkuk (tuil) ditarik ke belakang, dan garpu ditarik semula untuk menyelesaikan tugas mengambil atau memindahkan! Walaupun prinsip garpu pencengkam adalah sama seperti garpu teleskopik biasa, bahagian penghantaran, rod penyambung dan komponen lain garpu jari adalah sangat berbeza. Ia digunakan untuk menerangkan bahawa roda rantai, rantai, gear, rak, dsb. semuanya digantikan dengan roda segerak, tali pinggang segerak, dsb., manakala lengan gelongsor menggunakan rel panduan, dan bahan badan garpu semuanya digantikan dengan kepingan logam atau bahan aloi aluminium, jadi berat garpu penggenggam hanya kira-kira 80kg.
Di samping itu, perlu diperhatikan bahawa semasa reka bentuk garpu teleskopik jenis penggenggam, saiz rak penyimpanan padat, kedudukan menegak rak dengan kotak, paras trek dan saiz kotak harus digabungkan untuk menentukan parameter keseluruhan garpu sambungan (pergerakan garpu sambungan, jarak kotak, lebar garpu, lebar dalaman garpu, ketinggian garpu, dll.), untuk memenuhi keperluan bekas di rak. Garpu pengapit hanya boleh memindahkan atau mengakses produk yang dibungkus dalam karton atau kotak plastik dengan berkesan, dan tidak boleh memindahkan bahan yang tidak teratur. Di samping itu, isipadu dan berat kotak bahan yang dipindahkan tidak boleh terlalu besar, dan berat beban tidak boleh melebihi 100KG! Ketinggian garpu pengapit biasanya direka mengikut ketinggian tong!
Mengenai Klip HEGERLS pada Ulang-alik
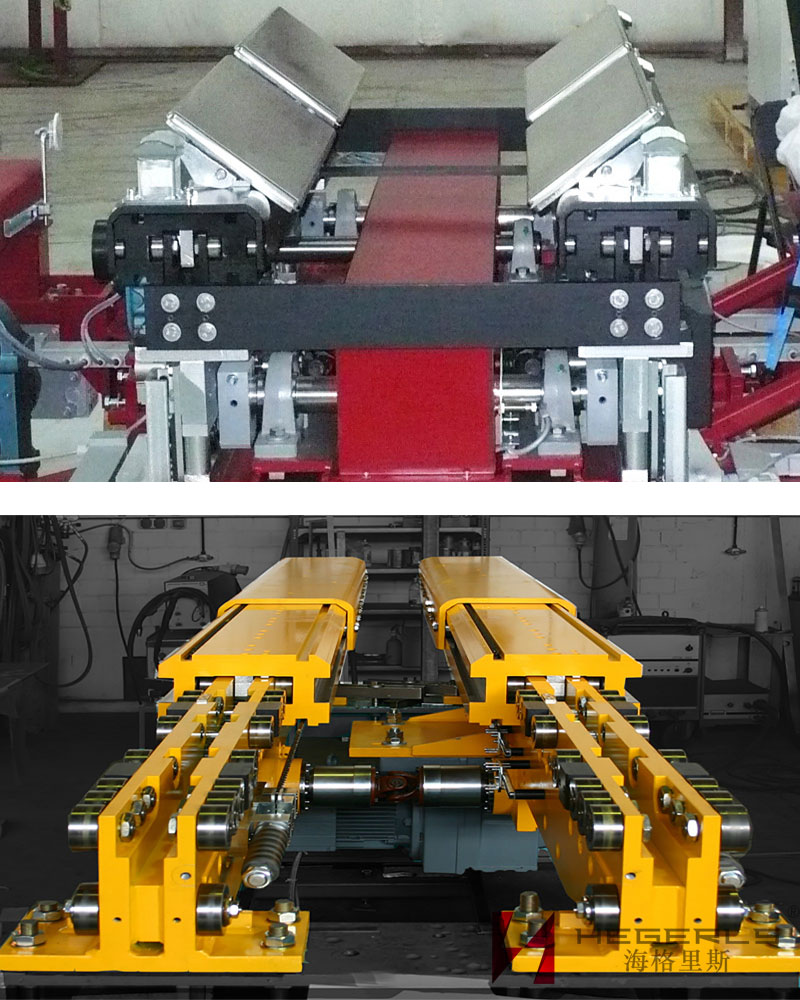
Struktur klip HEGERLS pada ulang-alik terdiri daripada rangka ulang-alik, casis ulang-alik, mekanisme perjalanan, mekanisme sambungan garpu sekunder, pengumpul, plat galas dan platform galas. Strukturnya adalah seperti berikut:
Sebarang bingkai ulang-alik biasanya merupakan rongga tertutup yang terdiri daripada kurungan badan utama pada kedua-dua belah, cangkerang dan kurungan hab dalam, dan masing-masing disusun pada kedua-dua hujung casis ulang-alik; Cangkerang disediakan dengan penutup atas yang boleh dibuka dan ditutup melalui engsel pintu pusing ganti; Rak dawai panel disusun di atas kurungan hab; Mekanisme perjalanan terdiri daripada roda pemacu, roda pasif, motor tanpa berus DC, pengurang dan aci penyambung; Kedua-dua belah rangka ulang-alik pada satu hujung casis ulang-alik disediakan dengan roda pemanduan yang disambungkan dengan aci penyambung, dan kedua-dua belah bingkai ulang-alik di hujung satu lagi casis ulang-alik disediakan dengan roda pasif yang disambungkan dengan aci penyambung; Motor tanpa berus DC bekerjasama dengan pengurang untuk memacu roda pemacu dan memacu roda pasif; Aci penyambung disediakan dengan pengekod magnetik, yang melaluinya kedudukan permulaan dan perhentian ulang-alik di landasan lurus diperolehi; Mekanisme sambungan garpu sekunder disusun secara simetri pada bahagian dalam rangka kereta ulang-alik; Casis ulang-alik antara mekanisme sambungan garpu sekunder disediakan dengan platform galas untuk meletakkan bakul kargo; Rongga tertutup rangka kereta ulang-alik masing-masing disediakan dengan plat galas, di mana plat pemanduan, plat kawalan utama mekanisme perjalanan dan plat kawalan utama mekanisme sambungan garpu disusun berturut-turut; Plat pemanduan memacu mekanisme perjalanan untuk memandu ulang-alik untuk berjalan di atas trek lurus. Papan kawalan utama mekanisme perjalanan mengawal parameter larian dan kedudukan mula berhenti ulang-alik, dan papan kawalan utama mekanisme sambungan garpu mengawal mekanisme sambungan garpu sekunder untuk merebut dan meletakkan bakul di atas rak; Peranti pengumpul ditetapkan di antara kereta ulang-alik dan trek lurus, yang disambungkan dengan wayar elektrik yang disusun di dalam trek lurus dan digunakan untuk membekalkan kuasa untuk kereta ulang-alik. Ciri struktur klip pada kereta ulang-alik pintar untuk penyimpanan juga terletak pada alur yang ditetapkan pada kedudukan di mana roda pemanduan dan roda pasif masing-masing menghubungi aci penyambung, dan cincin penahan elastik ditetapkan dalam alur untuk membentuk paksi. kedudukan roda pemanduan dan roda pasif. Roda pemandu berkembar masing-masing ditetapkan di sisi casis ulang-alik di bawah roda pemanduan dan roda pasif, dan di antara trek lurus dan casis ulang-alik. Roda pemandu berkembar membentuk had kiri dan kanan apabila roda pemanduan dan roda pasif berjalan di atas trek lurus. Mekanisme sambungan garpu sekunder termasuk: plat tolak sambungan garpu peringkat pertama, plat sambungan garpu peringkat kedua, mekanisme takal segerak peringkat kedua, mekanisme pemacu sambungan garpu peringkat kedua, motor pemacu sambungan garpu, satu lagi pengurang, dan aci pemacu ; Bahagian luar pendakap hab rangka kereta ulang-alik disediakan dengan plat tolak sambungan garpu peringkat pertama; Pelongsor berbentuk U disusun di tengah-tengah plat penolak garpu peringkat pertama, dan beberapa takal pelongsor berbentuk U disusun pada jarak yang sama dalam pelongsor berbentuk U; Plat garpu sekunder disusun di luar pelongsor berbentuk U; Plat garpu sekunder disambungkan dengan beberapa takal alur berbentuk U melalui bolt dan nat; Hujung atas plat sambungan garpu peringkat kedua masing-masing disediakan dengan garpu anjakan, motor pengurang planet DC dan sensor fotoelektrik dari luar ke dalam; Sensor fotoelektrik digunakan untuk mendapatkan isyarat kedudukan garpu dan menghantarnya ke papan kawalan utama mekanisme sambungan garpu, yang mengawal motor pengurang planet DC untuk memacu garpu untuk bergerak secara mendatar atau menegak; Mekanisme takal segerak sekunder masing-masing disusun pada plat penolak garpu utama dan terus di bawah dan di atas pelongsor berbentuk U; Mekanisme takal segerak sekunder disambungkan dengan plat penekan tali pinggang segerak pada plat sambungan garpu sekunder; Motor pemacu sambungan garpu dan satu lagi pengurang memacu mekanisme pemacu sambungan garpu sekunder untuk bergerak, dan memacu mekanisme pemacu sambungan garpu sekunder di sisi lain untuk bergerak melalui aci pemacu, supaya plat tolak sambungan garpu primer bergerak dan memacu sekunder mekanisme takal segerak untuk bergerak, sekali gus memacu plat sambungan garpu sekunder untuk bergerak. Mekanisme penghantaran sambungan garpu dua peringkat terdiri daripada pengekod magnet, takal tali pinggang segerak I, tali pinggang segerak I, peranti roda penegang dan rak; Takal tali pinggang masa 1 dan tali pinggang masa 1 disusun di bawah plat penolak garpu peringkat pertama; Satu sisi takal tali pinggang segerak I disambungkan dengan aci penghantaran, dan bahagian lain disambungkan dengan aci keluaran pengurang lain melalui alur kunci. Peranti roda penegang masing-masing ditetapkan pada kedua-dua belah pengurang lain untuk penetapan tambahan takal tali pinggang segerak I dan tali pinggang segerak I; Rak disusun antara plat penolak garpu peringkat pertama dan tali pinggang segerak; Motor pemacu sambungan garpu dan satu lagi pengurang memacu takal tali pinggang segerak I dan tali pinggang segerak I untuk berputar, dan memacu takal tali pinggang segerak II dan tali pinggang segerak II di bahagian lain untuk berputar melalui aci penghantaran. Pada masa yang sama, rak pada kedua-dua belah memacu plat tolak sambungan garpu utama yang sepadan untuk mencapai sambungan garpu utama. Apabila mekanisme takal tali pinggang segerak menengah bergerak serentak dan memacu plat sambungan garpu sekunder untuk bergerak, takal berbentuk U bergolek dalam pelongsor berbentuk U, Jadikan plat sambungan garpu sekunder merealisasikan sambungan garpu sekunder. Peranti roda penegang termasuk: bolt, pendakap pelaras, nat dua kali dan roda penegang; Roda penegang disusun di bawah tali pinggang segerak I dan pada kedua-dua belah pengurang lain, dan dipasang pada pendakap badan utama melalui nat berganda; Pendakap pelaras disusun di bawah nat berganda melalui bolt, dan kedudukan pendakap pelaras dilaraskan oleh bolt, supaya pendakap pelaras memacu nat berganda untuk bergerak ke atas dan ke bawah, supaya tali pinggang segerak I boleh mengekalkan keadaan ketegangan di bawah tindakan roda penegang.
Bagaimanakah perniagaan bas ulang-alik HEGERLS akan mendapat manfaat?
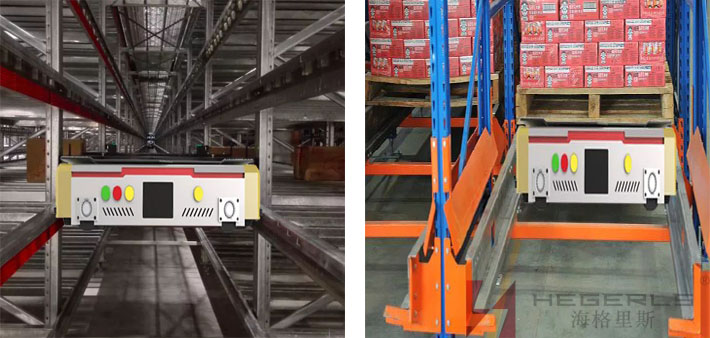
Pertama, mekanisme perjalanan, mekanisme sambungan garpu dan bingkai, talian sesentuh gelongsor dan peranti pengumpulan kuasa kereta ulang-alik pintar HEGERLS dengan klip pada storan disusun dengan munasabah, yang menggunakan sepenuhnya ruang kereta ulang-alik, dan boleh menyesuaikan diri dengan penyimpanan automatik dan pengambilan semula barangan dengan spesifikasi dan lokasi yang berbeza dalam gudang tiga dimensi, memperluaskan liputan aplikasi kereta ulang-alik, dan dengan cepat dan berkesan menyelesaikan satu siri tindakan berterusan kereta ulang-alik, seperti berjalan, sambungan garpu, memetik. dan meletakkan barang, Ia menyedari penyimpanan barangan yang pantas dan tepat, sekali gus meningkatkan kecekapan operasi dan tahap teknologi automasi gudang automatik, dan mengurangkan kos pelaburan perusahaan. Pada masa yang sama, ia mudah dan ringan dalam struktur, tinggi dalam kebolehpercayaan, dan mudah diselenggara. Ia boleh menggantikan penumpuk jalan raya tradisional, merealisasikan fleksibiliti sistem, dan mematuhi trend pembangunan logistik e-dagang dan automasi pergudangan.
Kedua, dalam mekanisme perjalanan kereta ulang-alik pintar HEGERLS, aci penyambung roda pemanduan dan roda pasif disediakan dengan alur, dan bahagian penyambung galas disambungkan oleh cincin penahan elastik jenis baharu, merealisasikan kesan kedudukan paksi penyambungan. aci; Dengan menggunakan cincin penahan elastik untuk mencapai kesan kedudukan paksi, kecekapan pengeluaran dapat ditingkatkan dan kos dapat dijimatkan.
Ketiga: Kereta ulang-alik pintar Higelis HEGERLS untuk menyimpan storan menyedari bahawa roda pemanduan dan roda pasif sentiasa bergerak di landasan lurus tanpa menyimpang dari trek melalui struktur roda pemandu berkembar. Struktur kedudukan ini lebih stabil dan boleh dipercayai.
Keempat, struktur sambungan garpu sekunder yang diguna pakai oleh kereta ulang-alik pintar HEGERLS boleh menjadikan jarak sambungan garpu lebih jauh dan memperoleh lebih banyak bakul pada kedudukan yang berbeza; Pada masa yang sama, prinsip mekanisme sambungan garpu sekunder adalah mudah, dan kos reka bentuk dan pembuatan adalah rendah; Bahagian penghantaran menggunakan mod motor tunggal + pengurang + aci penghantaran untuk menjadikan mekanisme sambungan garpu sekunder mencapai tujuan pengembangan dan pengecutan segerak, yang menjimatkan lebih banyak kos, mengurangkan ruang susun atur yang diperlukan dengan berkesan, dan mengurangkan berat kereta ulang-alik. .
Kelima, kereta ulang-alik pintar Higelis HEGERLS menggunakan peranti roda penegang jenis baharu, yang boleh memastikan tali pinggang segerak tetap tegang dan merealisasikan kerja biasa kereta ulang-alik. Selain itu, peranti roda penegang ini mudah dibuat, mudah dipasang dan boleh dilaraskan dengan cepat, yang menjimatkan kos, menjimatkan ruang dan meningkatkan kecekapan kerja.
Masa siaran: Dis-19-2022